




















芝浦工業大学 システム理工学部の大谷拓也准教授、早稲田大学 理工学術院の高西淳夫教授と富士通は、量子コンピューターを活用してロボットの姿勢を効率的に制御する新手法を開発した。
具体的には、複数の関節を持つロボットの「逆運動学計算」(目標位置に到達するための関節角度の計算)を、量子技術を活用して効率的かつ高精度に解くことに成功。理化学研究所と富士通が共同開発した64量子ビットの実機検証で、その有効性を確認した。
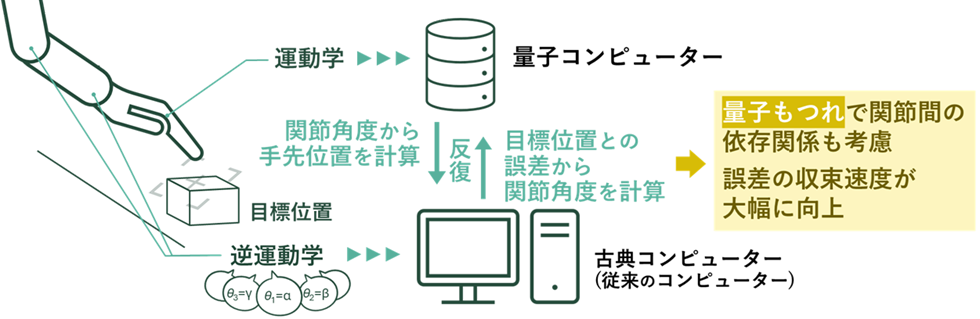
ロボットの各部(リンク)の向きや位置を量子ビットで表現し、親関節の動きが子関節に影響する構造を量子もつれで再現することで、従来の古典的手法と比べて必要な計算回数を大幅に削減。量子コンピューターの実用化が進めば、リアルタイム制御や複雑な動作が求められる次世代ロボット開発への貢献が期待できるという。
ポイント
- ロボットの関節の動きを量子ビットで表現し、量子回路を使って順運動学を計算
- 量子もつれの導入で関節間の連動性を再現し、計算速度と精度を向上
- 富士通の量子シミュレーターでの検証で、従来手法よりも高い精度と実用性を確認。また64量子ビットの超伝導量子コンピューター(以下、64量子ビットの実機)でも量子もつれ導入の効果を確認
【関連記事】
・富士通、量子回路計算を200倍高速化する技術を開発 量子コンピュータの材料開発への応用など期待
・富士通とデルフト工科大学、量子コンピューティングの研究開発加速に向け産学連携拠点を設置
・富士通、量子アプリケーション開発の成果を競うコンテストを開催 受賞4チームを発表
